
iOS 陀螺仪技术的应用探究
本文源自本人的学习记录整理与理解,其中参考阅读了部分优秀的博客和书籍,尽量以通俗简单的语句转述。引用到的地方如有遗漏或未能一一列举原文出处还望见谅与指出,另文章内容如有不妥之处还望指教,万分感谢。
前言
陀螺仪是一种硬件传感器,能够感知设备的旋转和方向变化。它通常通过MEMS(微机电系统)技术来实现,内部包含了微小但高精度的陀螺仪器件、加速度计和磁力计等传感器,可以实时地感知设备在空间中的旋转角度和方向。
在iOS系统中,可以通过CoreMotion框架来访问陀螺仪的数据。在开发iOS应用程序时,可以使用CoreMotion框架提供了一个CMMotionManager类,该类可以用来获取设备的运动数据,包括陀螺仪数据、加速度计数据等。
iOS陀螺仪的精度和灵敏度通常比较高,可以实现比加速度计更加准确的姿态估计和方向识别,也可以帮助开发者实现更加真实的虚拟现实和增强现实应用。同时,iOS陀螺仪的实时响应和低功耗特性,也使得它在移动应用程序开发中得到了广泛的应用和认可。
基础知识
在开发前,有几个基础的知识点,我们需要事先了解,这对我们后期开发会有更好的帮助
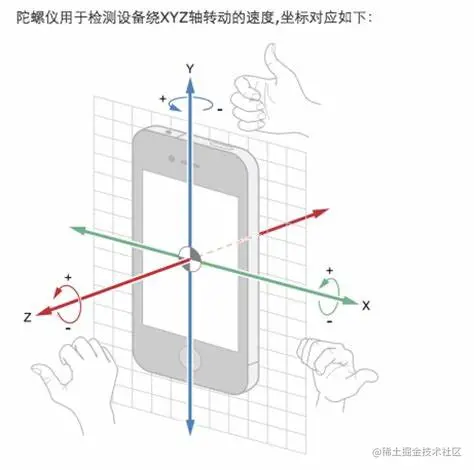
三轴方向
在 iOS 中,陀螺仪传感器的三轴方向通常遵循右手系的规则。具体来说:
- x 轴:表示设备绕着横轴旋转。当设备的屏幕朝上时,x 轴指向设备的右侧;当设备的屏幕朝下时,x 轴指向设备的左侧
- y 轴:表示设备绕着纵轴旋转。当设备的屏幕朝上时,y 轴指向设备的顶部;当设备的屏幕朝下时,y 轴指向设备的底部
- z 轴:表示设备绕着竖轴旋转。当设备的屏幕朝上时,z 轴指向设备的正面;当设备的屏幕朝下时,z 轴指向设备的背面
姿态信息
陀螺仪用于侦测设备沿三个轴为中线所旋转时的角速度,故有了三个姿态信息,分别为 pitch (纵倾), roll (横倾) 和 yaw (横摆)
pitch(俯仰角):表示设备绕着 x 轴旋转的角度,也称为纵倾角。当设备正面朝上时,俯仰角为 0°;当设备向上仰起时,俯仰角为正值;当设备向下倾斜时,俯仰角为负值roll(横滚角):表示设备绕着 y 轴旋转的角度,也称为横倾角。当设备正面朝上时,横滚角为 0°;当设备向右侧倾斜时,横滚角为正值;当设备向左侧倾斜时,横滚角为负值yaw(偏航角):表示设备绕着 z 轴旋转的角度,也称为横摆角。当设备正面朝北时,偏航角为 0°;当设备逆时针旋转时,偏航角为正值;当设备顺时针旋转时,偏航角为负值CMRotationMatrix结构体表示设备绕X、Y、Z轴的旋转矩阵,可用于描述设备在三维空间中的方向和旋转状态, 这里再细讲该结构体中9个元素所代表的含义

陀螺仪的使用
import CoreMotion
let motionManager = CMMotionManager()
if motionManager.isGyroAvailable {
motionManager.gyroUpdateInterval = 0.1
motionManager.startGyroUpdates(to: OperationQueue.main) { (data, error) in
if let gyroData = data {
let rotationRateX = gyroData.rotationRate.x
let rotationRateY = gyroData.rotationRate.y
let rotationRateZ = gyroData.rotationRate.z
print("Rotation Rate X: \(rotationRateX)")
print("Rotation Rate Y: \(rotationRateY)")
print("Rotation Rate Z: \(rotationRateZ)")
}
}
} else {
print("Gyroscope is not available.")
}
关键类解析
CMDeviceMotion
CMDeviceMotion 是一个 Core Motion 框架中的类,用于表示设备的运动和姿态信息。通过 CMDeviceMotion 类,可以获取到设备在三维空间中的加速度、旋转速度、重力加速度、旋转矩阵以及设备的姿态信息等,以便进一步进行处理和计算。
下面是 CMDeviceMotion 类中常用的属性和方法:
attitude属性:表示设备的姿态信息,包括俯仰角(pitch)、横滚角(roll)和偏航角(yaw)等信息。userAcceleration属性:表示设备在三维空间中的加速度,即不包括重力加速度的加速度rotationRate属性:表示设备在三维空间中的旋转速度gravity属性:表示设备在三维空间中的重力加速度,即不包括设备加速度的重力加速度
需要注意的是,在使用 CMDeviceMotion 类时,需要首先创建一个 CMMotionManager 对象,并设置其属性和回调函数,以便获取设备的运动和姿态信息。此外,由于设备运动和姿态信息的获取涉及到多个传感器的协同工作,因此在使用时需要考虑传感器的准确性和稳定性,以避免误差和不良体验。
CMAttitude
CMAttitude 表示设备在三维空间中的姿态信息,包括设备的旋转、倾斜、方向等信息。在 iOS 开发中,可以通过 CMMotionManager 获取设备的姿态信息,然后将其保存为 CMAttitude 对象,并使用其中的各个属性来进行相应的处理和计算。
CMAttitude 类中的主要属性如下:
- pitch:设备绕 x 轴的旋转角度,单位为弧度
- roll:设备绕 y 轴的旋转角度,单位为弧度
- yaw:设备绕 z 轴的旋转角度,单位为弧度
- quaternion:设备的四元数表示,用于表示设备的旋转状态,包括旋转角度和旋转轴等信息
- rotationMatrix:设备的旋转矩阵表示,用于表示设备在三维空间中的旋转状态
其中,pitch、roll 和 yaw 属性是最基本的属性,用于表示设备绕 x、y、z 轴的旋转角度。一般来说,可以通过这三个属性来进行设备的姿态检测和相应的处理。其余的属性包括四元数、旋转矩阵,都可以用于更加精确和复杂的姿态检测和处理。
应用场景
- 姿态估计和方向识别:通过陀螺仪获取设备旋转的角度和方向,可以实现设备的姿态估计和方向识别,广泛应用于游戏、导航、运动感知等领域
- 图像校正和稳定:通过将陀螺仪中的旋转信息应用于图像处理,可以实现图像校正和稳定,提高图像质量和用户体验
- 虚拟现实和增强现实:通过与其他传感器的结合和数据处理,可以实现更加真实的虚拟现实和增强现实应用,如3D游戏、AR导航、AR应用等
- 运动检测和姿态跟踪:通过结合加速度计和地磁计等传感器的信息,可以实现设备的运动检测和姿态跟踪,如步数统计、运动轨迹记录、体感游戏等
- 安全防护和权限控制:通过使用陀螺仪的数据,可以实现设备的安全防护和权限控制,如设备锁定、用户身份验证、数据加密等
链接:https://juejin.cn/post/7239715294230183993
来源:稀土掘金
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
